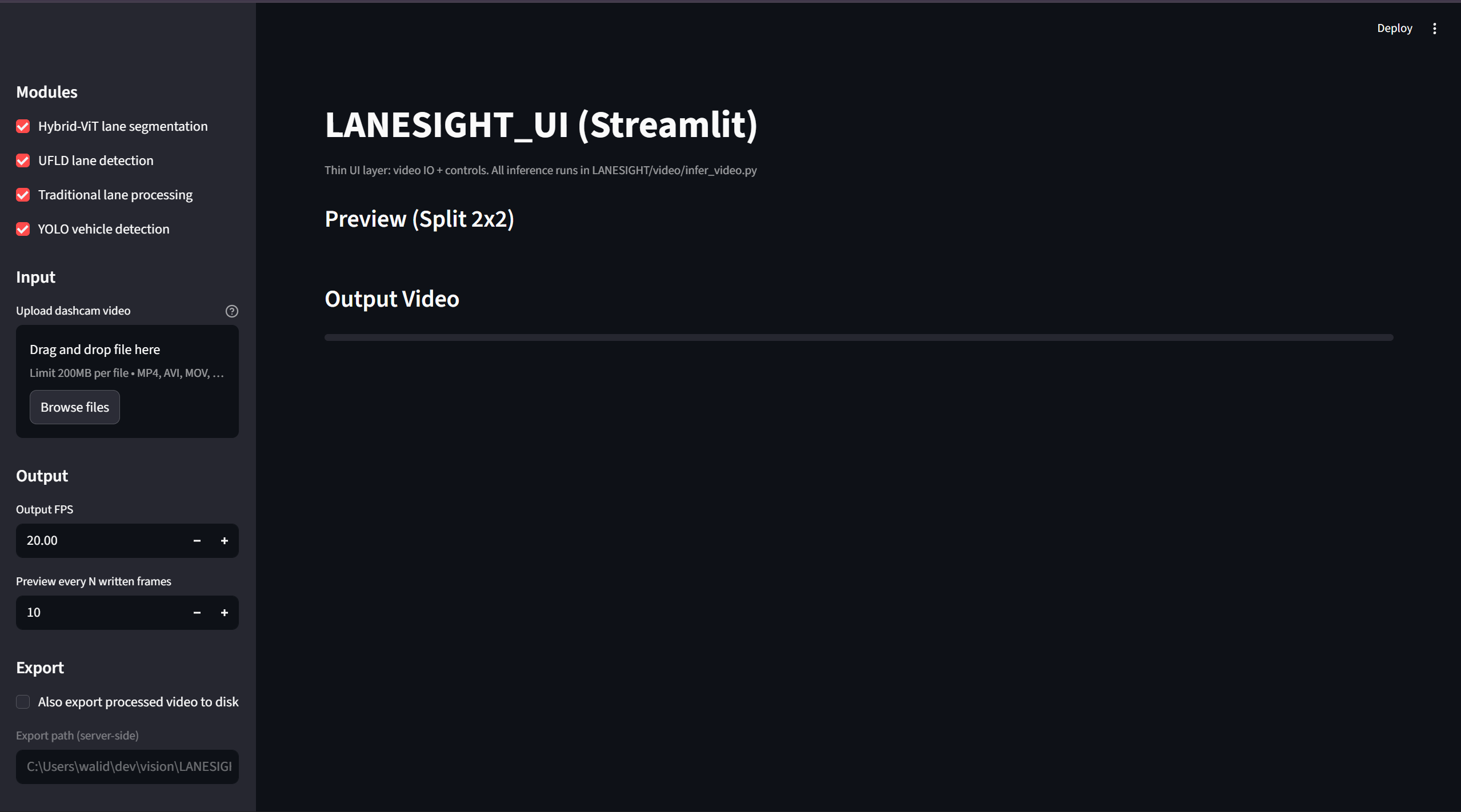
LaneSight
AI-powered lane perception for real-world driving scenes.
Overview
LaneSight is an end-to-end multi-paradigm lane perception system designed for real-world driving scenes.
It combines deep semantic understanding (Hybrid ViT-UNet) with geometric lane modeling (UFLD), classical vision priors, and object-aware filtering (YOLO) into a unified inference pipeline.
The core model leverages a CNN encoder with a Vision Transformer bottleneck to capture both local lane structures and long-range spatial dependencies. It is trained using class-balanced Cross-Entropy and Dice loss to handle extreme foreground/background imbalance.
At inference time, lane hypotheses are validated, filtered, and fused using semantic confidence maps and vehicle awareness, producing robust lane masks even under occlusions, clutter, or non-ideal road geometries.
This project demonstrates full ownership of the computer vision stack: architecture design, loss engineering, dataset debugging, GPU-safe training, and multi-model fusion — bridging deep learning, geometry, and classical vision in a production-oriented setup.
At a glance
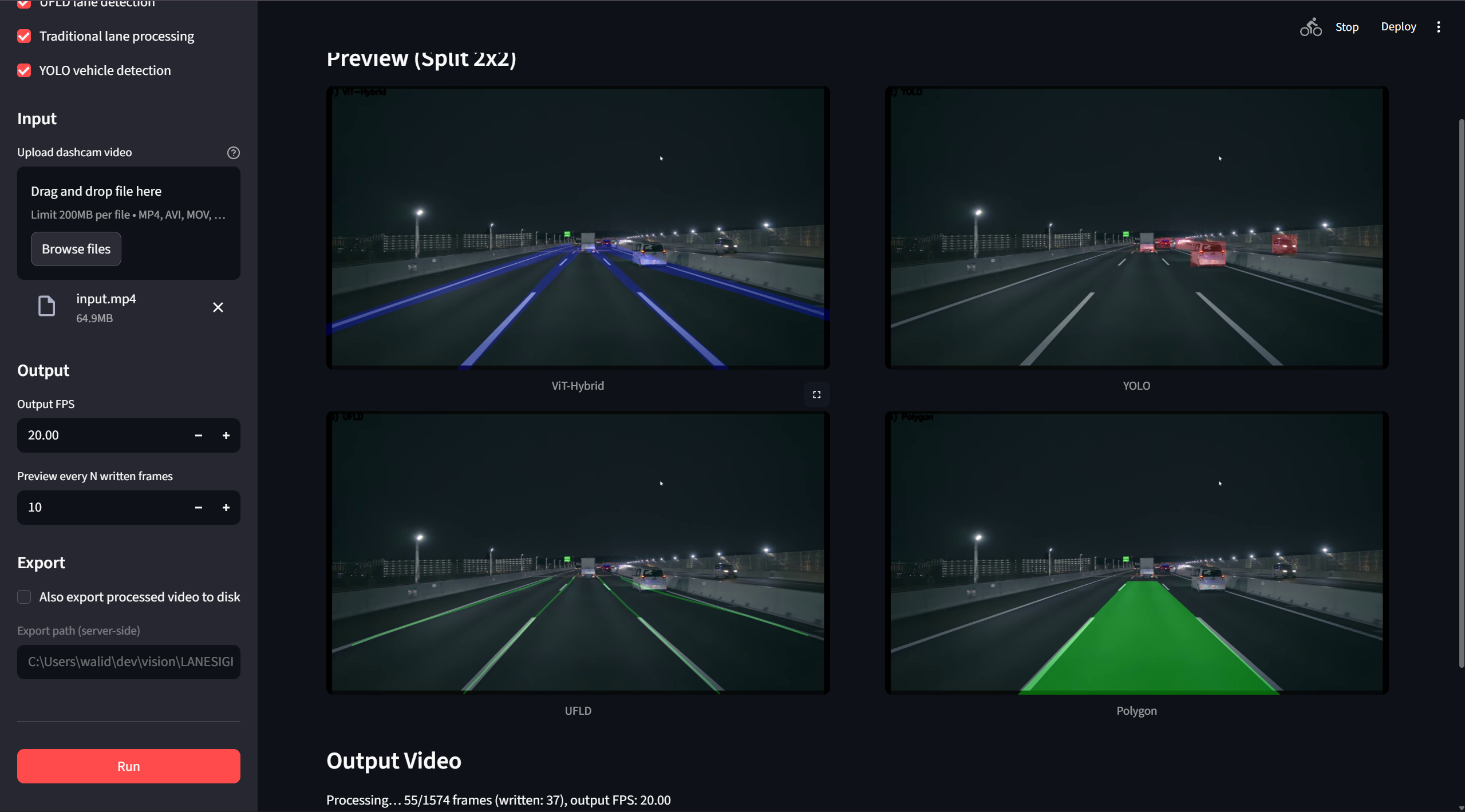
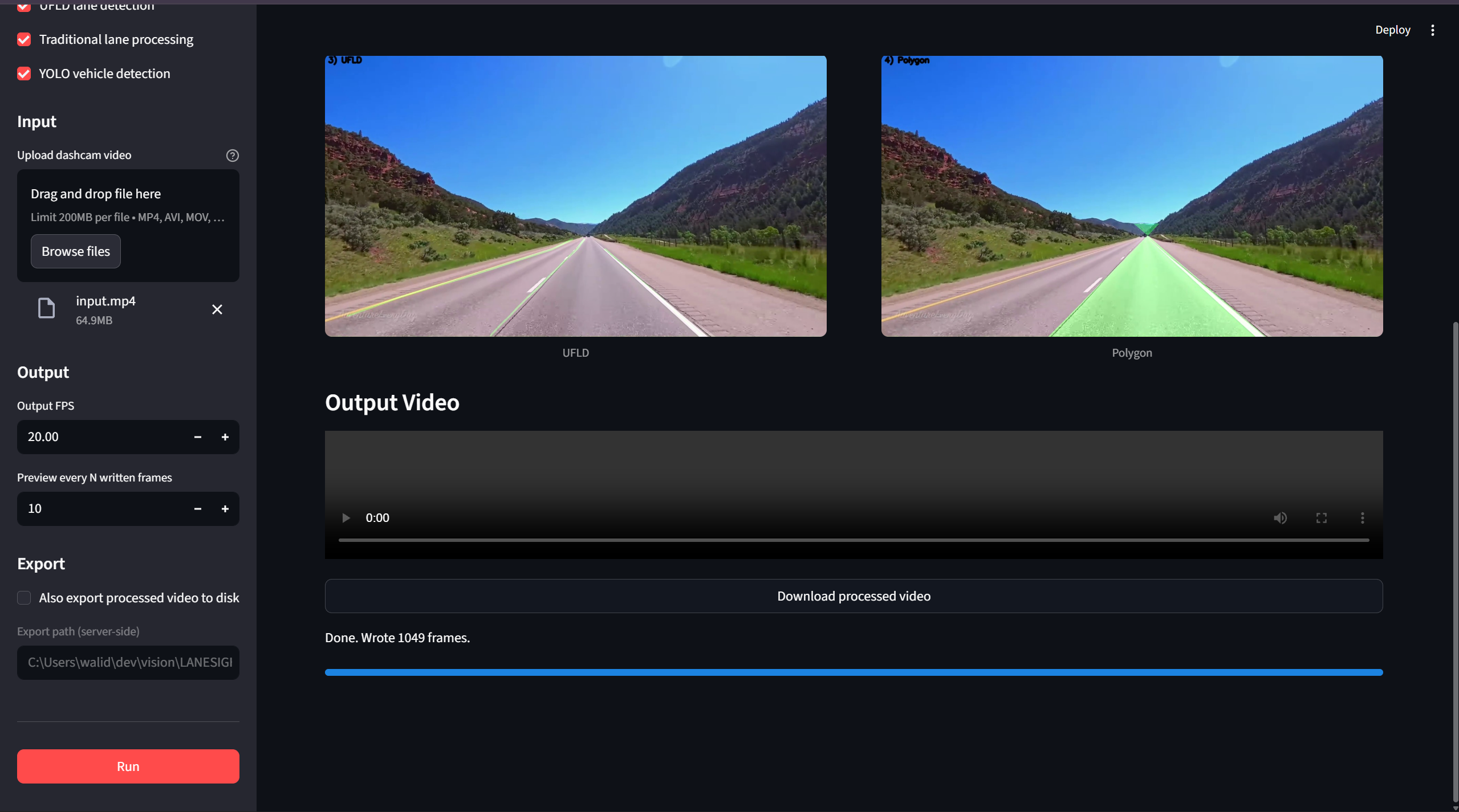
Demo
Preview video. (Muted looping hero + playable demo.)
Gallery
Screenshots, flows, and key moments.
Tech
Core ML
10 itemsGeometry
5 itemsPerception Fusion
5 itemsVision
11 itemsDetection
3 itemsInference
4 itemsExperimentation
8 itemsScientific Stack
5 itemsInfra
6 itemsDetails
Project info
Next steps
- • Enhance processing speed for real time use
- • Implement on embedded electronic system